|
Viele Sonden, ein gemeinsames Ziel
von Stefan Deiters
astronews.com
28. Oktober 2009
Die Zukunft der robotergestützten Erkundung von Planeten und Monden des
Sonnensystems dürfte sich deutlich von den aktuellen Ansätzen unterscheiden.
Amerikanische Experten arbeiten bereits an fortschrittlichen Robotersonden,
die Informationen austauschen und ihre Aktionen gegenseitig beeinflussen
können. Der Saturnmond Titan könnte so gleichzeitig aus dem All, aus der
Luft und vom Boden aus erforscht werden.
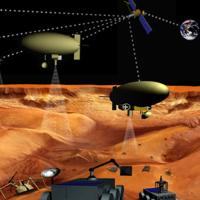
Mehrere Sonden und Rover könnten künftig
gemeinsam und autonom einen Planeten oder Mond
erkunden.
Bild: NASA / JPL |
"Die Erforschung anderer Planeten und Monde wird mit nichts vergleichbar
sein, was wir heute machen", ist Wolfgang Fink, Direktor des Visual and
Autonomous Exploration Systems Research Laboratory am California
Institute of Technology, überzeugt. "Die Zeiten, in denen man eine einzelne
Sonde ohne jegliche Redundanz von der Erde steuert gehen zu Ende." Die Zukunft,
so Fink, gehört mehreren relativ billigen Sonden, die sich selbst
steuern und mit anderen Robotersonden kommunizieren können, die sich gerade an anderen Stellen
befinden.
Um diese Vision Wirklichkeit werden zu lassen, arbeiten Fink und sein Team an
einer Steuerungssoftware, die den autonomen Betrieb einer Sonde erlaubt, die
gleichzeitig Mitglied einer größeren Gruppe von Robotersonden ist. Die Sonde
soll so selbstständig Probleme, mögliche Gefahren aber auch interessante
Regionen erkennen und Ziele für nähere Erkundungen auswählen können. Die
Wissenschaftler
haben zum Ausprobieren der Software zudem eine Testanlage entwickelt.
Bislang wurden Robotersonden bestimmte Aufgaben von der Erde gestellt und
dann gewartet, bis diese ausgeführt wurden. Eine große Flexibilität bestand
dabei nicht. Die Aufnahme eines plötzlichen Erdrutsches oder der Eruption eines
Cryovulkans gelingt so eher zufällig. "In Zukunft sollen mehrere Roboter an den
Schalthebeln sitzen", erläutert Fink. "Sie würde Informationen praktisch in
Echtzeit austauschen. Zukünftige Missionen zum Saturnmond Titan, zum Mars oder
anderen Objekten könnten so entwickelt werden. Ein Vorschlag für eine
Titanmission umfasst etwa einen Orbiter, einen Ballon sowie Rover oder Lander,
die in einem See aufsetzen."
Der Orbiter würde dabei den Saturnmond umkreisen und hätte so eine globale
Perspektive auf das Geschehen. Mit Hilfe eines Ballons oder Luftschiffes würden
sich Aufnahmen aus niedrigerer Höhe machen lassen. Es könnten etwa
Bergketten, Seen und Täler fotografiert werden. Am Boden würden dann Rover und Lander detailliertere Untersuchungen anstellen. Der Orbiter könnte direkt mit
dem Ballon kommunizieren und ihn in bestimmte Regionen steuern um diese genauer
zu untersuchen. Genauso könnte der Ballon die Roboter auf dem Boden zu
interessanten Regionen leiten. "Es ist so, als würde man eine kleine Armee
befehligen, die aus Robotern im Weltraum, in der Luft und auf dem Boden
besteht."
Die Vorteile dieses Prinzips liegen auf der Hand: Wenn etwa ein Rover
feststellt, dass es recht glattes Geröll in seiner Umgebung gibt, wäre es mit
Hilfe des Ballons möglich zu verifizieren, ob er sich tatsächlich gerade
in einem ausgetrockneten Flussbett aufhält. So würden sich globale Informationen
mit sehr lokalen Daten verknüpfen lassen, was bislang kaum möglich ist. Erste Ansätze
einer Zusammenarbeit von Sonden gibt es bereits: So kommunizieren die beiden
Marsrover mit den Sonden im Marsorbit. Allerdings dienen diese dabei bislang nur
als Relaystation zur Kommunikation mit der Erde. Ein Austausch von Informationen
findet nicht statt.
"Im Grunde genommen wollen wir Roboter entwickeln, die andere Roboter steuern
können", fasst Fink zusammen. "Eines Tages wird eine ganze Flotte von Sonden auf
einmal gesteuert werden können. Sie wird zu unseren Augen, Ohren, Armen und
Beinen werden und aus dem All, der Luft und auf dem Boden selbstständig das
Unbekannte erforschen."
|





